Regulation on AVAS requirements

AVAS (Acoustic Vehicle Alerting System) regulation refers to the requirement for electric and hybrid vehicles to emit a sound while driving at low speeds, typically up to 30 km/h, in order to alert pedestrians and other road users of their presence. This regulation is intended to improve safety for visually impaired individuals and other vulnerable road users who may not hear the vehicles approaching.
In the United States, the National Highway Traffic Safety Administration (NHTSA) has mandated that all new hybrid and electric vehicles sold in the country must have an AVAS system installed from September 2020. In Europe, similar regulations were introduced in July 2019, with all new electric and hybrid vehicles being required to have an AVAS system from July 2021. The specific requirements for the sound emitted by AVAS systems may vary by region or country.
AVAS systems typically use a speaker mounted on the exterior of the vehicle to emit a sound when the vehicle is driving at low speeds. The sound produced by the system may be a pre-recorded sound or a synthesized sound designed to be easily recognizable as a vehicle.
More details is below in the article:
Regulations
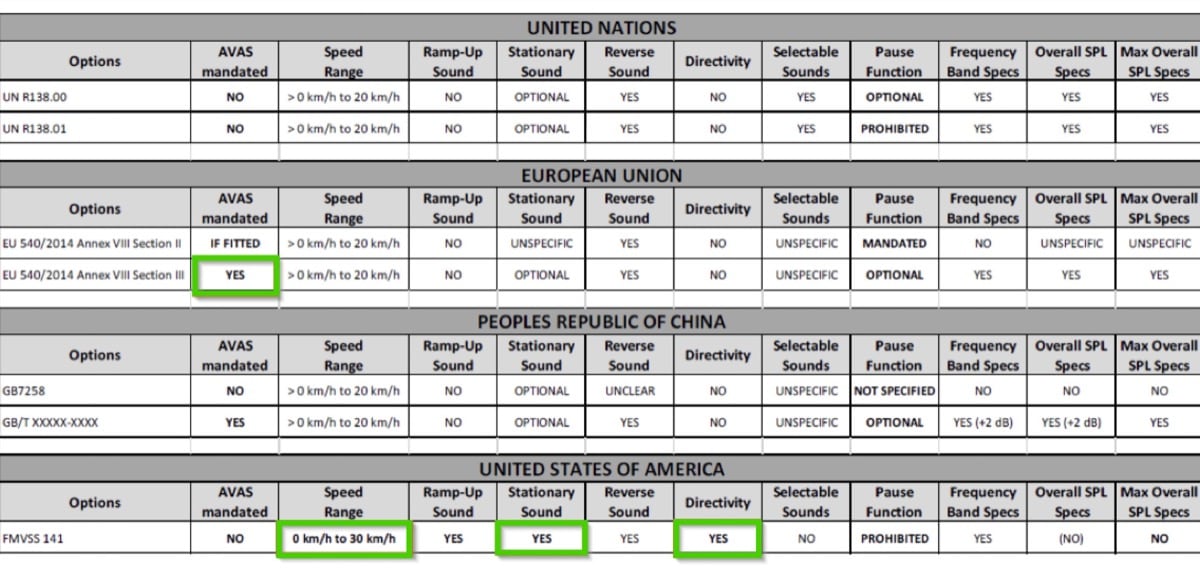
Application in key countries (GTR-QRTV-06-14)
Under review for UN R138.02
- prohibit operation of the AVAS outside 0 - 20 km/h range (GRBP-74-02)
- matching AVAS Requirements (UN R138) with RD ASEP (UN R51)(TFVS-04-12)
- Minimum sound is defined up to 40 km/h
- Maximum sound no longer constant, but ramped-up from > 0 km/h to 40 km/h*
- Even this is questionable given that xEVs have typically more rolling sound, because their heigher weight results in wider or extra load tyres. TFSL-02-10 Rev.2 (OICA)
- A-label tyres will require an operation of AVAS above 30 km/h vehicle speed for safe recognition of the vehicle.
- Optimization of uncertainties of 3rd octave measurements for minimum sound in UN R138.01 might provide further potentials to design more quiet AVAS systems.
Discussion for future implementation
- Sound specifically for the AV and have a smiler sound.
- Speaker needs to be redesigned. Benefit with focusing the sound, maybe no speaker and using more adjustment of the sound
- There is big interest for AV with different levels of sounds.
- An attenuation means the sound could change according the environment but can we really have fully trust in current technology? We can imagine in interim step with a system manageable by th driver instead of the computer.
- It is also reminded other technologies, other active safety devices/systems than audible systems could be used in the future for pedestrian detection and to provide safety benefits.
- The external environment is changing and we also have to keep this in the scope of our future discussions
Grey Zones in UN R138.01
- The specifications of this Regulation are applicable for the speed range of greater than 0 km/h up to and inclusive 20 km/h. Operation of an AVAS is permitted at vehicle speeds outside the specification range.
- Constant speed test only. No specifications are given for sound emission accelerated condition.
- Sound type (not determined in UN R138)
- Sound max volume (M1 vehicle in Reg. 540/2014, 75 dB(A) in UN R138)
- Attenuation. The AVAS sound level may be attenuated during periods of vehicle operation
- Next step: alignment with UN R138.01 (pause function prohibition)

Details of Regulation (EU) No 540/2014
II.3. Sound type and volume
The sound to be generated by the AVAS shall be a continuous sound that provides information to the pedestrians and other road users of a vehicle in operation. The sound should be easily indicative of vehicle behaviour and should sound similar to the sound of a vehicle of the same category equipped with an internal combustion engine.
The sound to be generated by the AVAS shall be easily indicative of vehicle behaviour, for example, through the automatic variation of sound level or characteristics in synchronisation with vehicle speed.
The sound level generated by the AVAS shall not exceed the approximate sound level of a vehicle of the M1 category equipped with an internal combustion engine and operating under the same conditions.
Development of ISO 16254
Observed test variation is significantly greater than assumed and in excess of stated measurement uncertainty in ISO 16254. (GRB-70-09)
- Replace single microphone with array microphone.
- The microphones shall be located 1,6, 1.4, 1.2, 1.0, 0.8 ±0,02m above the ground level.
- Report highest 1/3 octave band result within the array
- Use “Max Hold” as 1/3 octave reporting method
Pending approval of ISO/DIS 16254, ISO expects to propose amendments to UN R138 in line with the revised ISO 16254 text. 


Comparison of FMVSS 141 and ECE R138 (GTRQRTV-06-06)
This standard has several differences to all other standards:
 Two different assessment methods
Two different assessment methods- Speed range up to 30 km/h
- Ramp-up Sound (Relative Volume Change)
- Stationary Sound mandatorY
- Directivity Measurement
There is a small overlap to UN R138, but most specifications are different.